4" Avionics

CAD
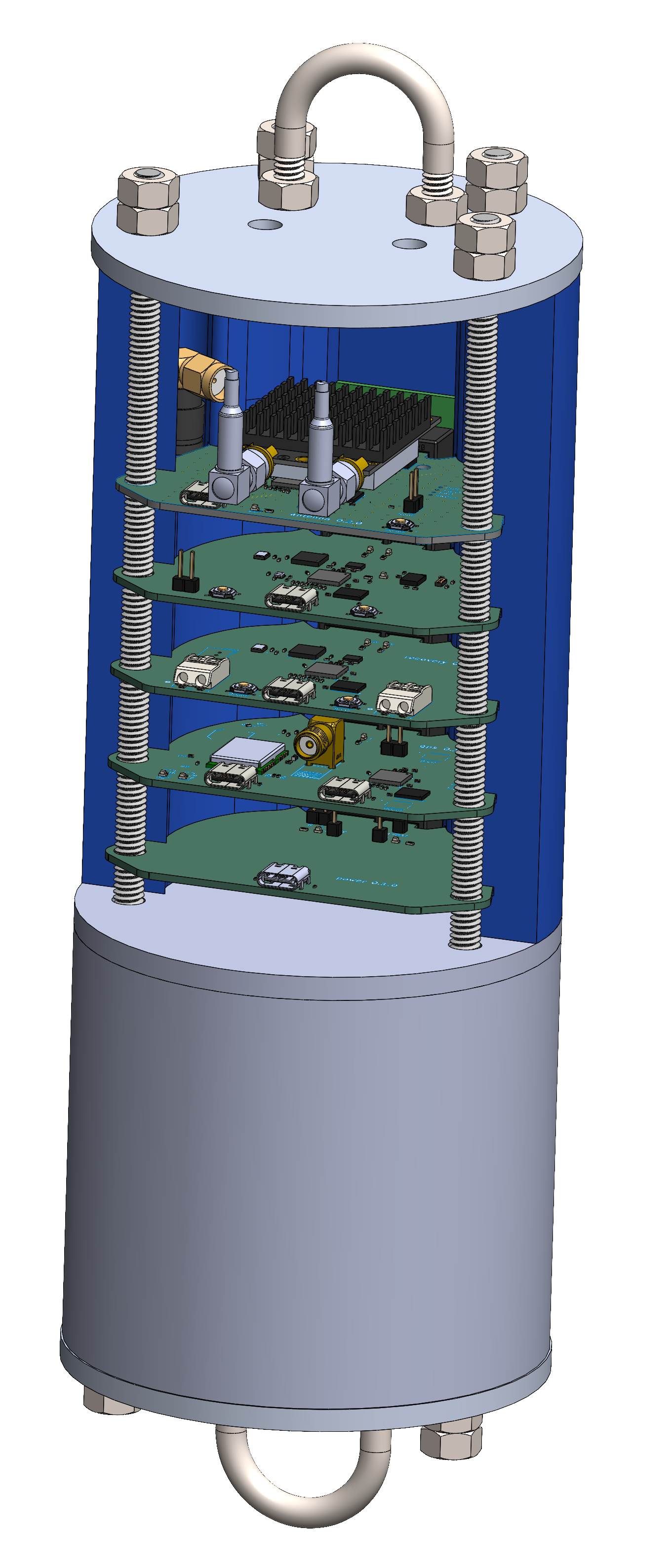
Overview of System
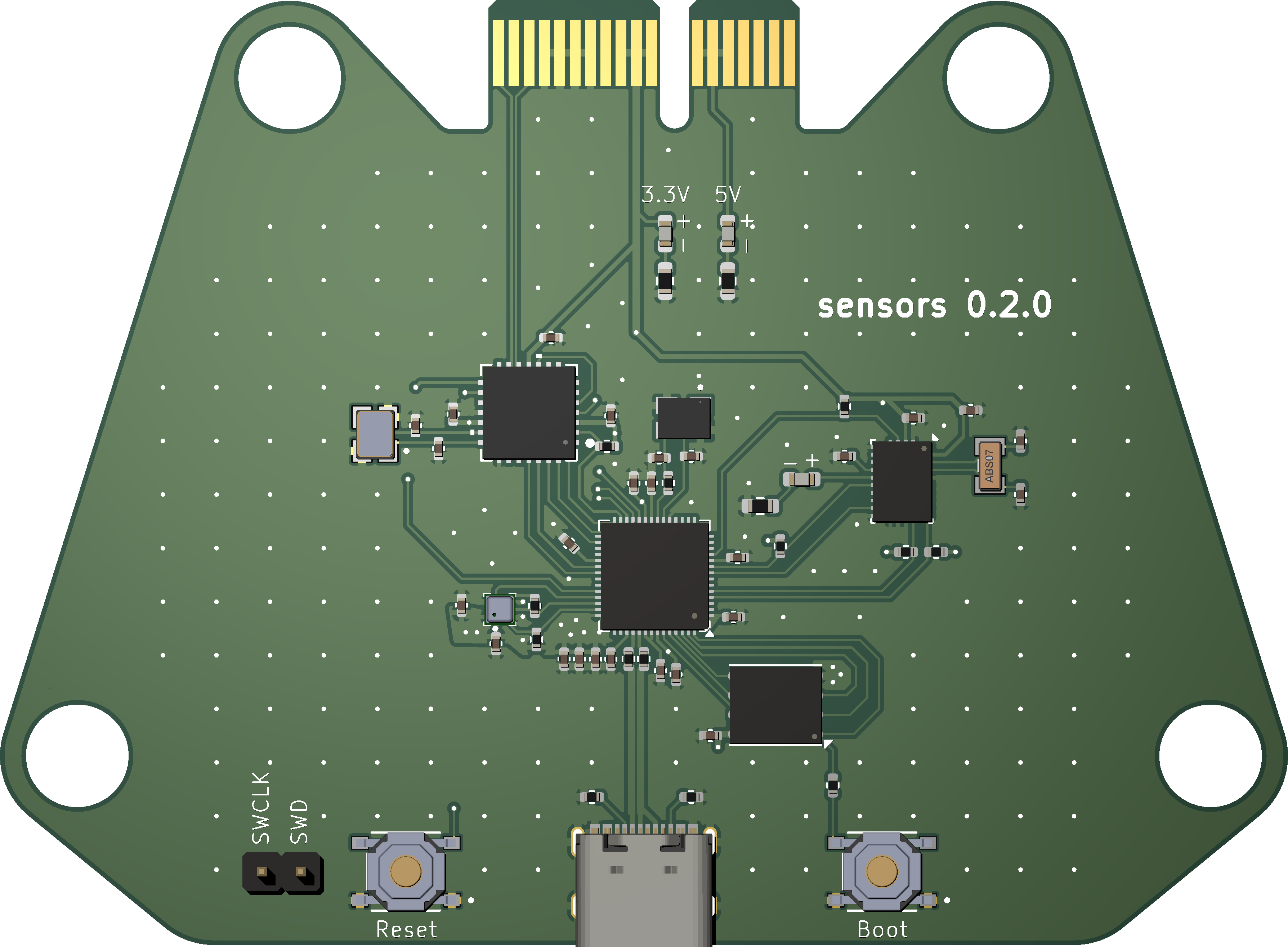
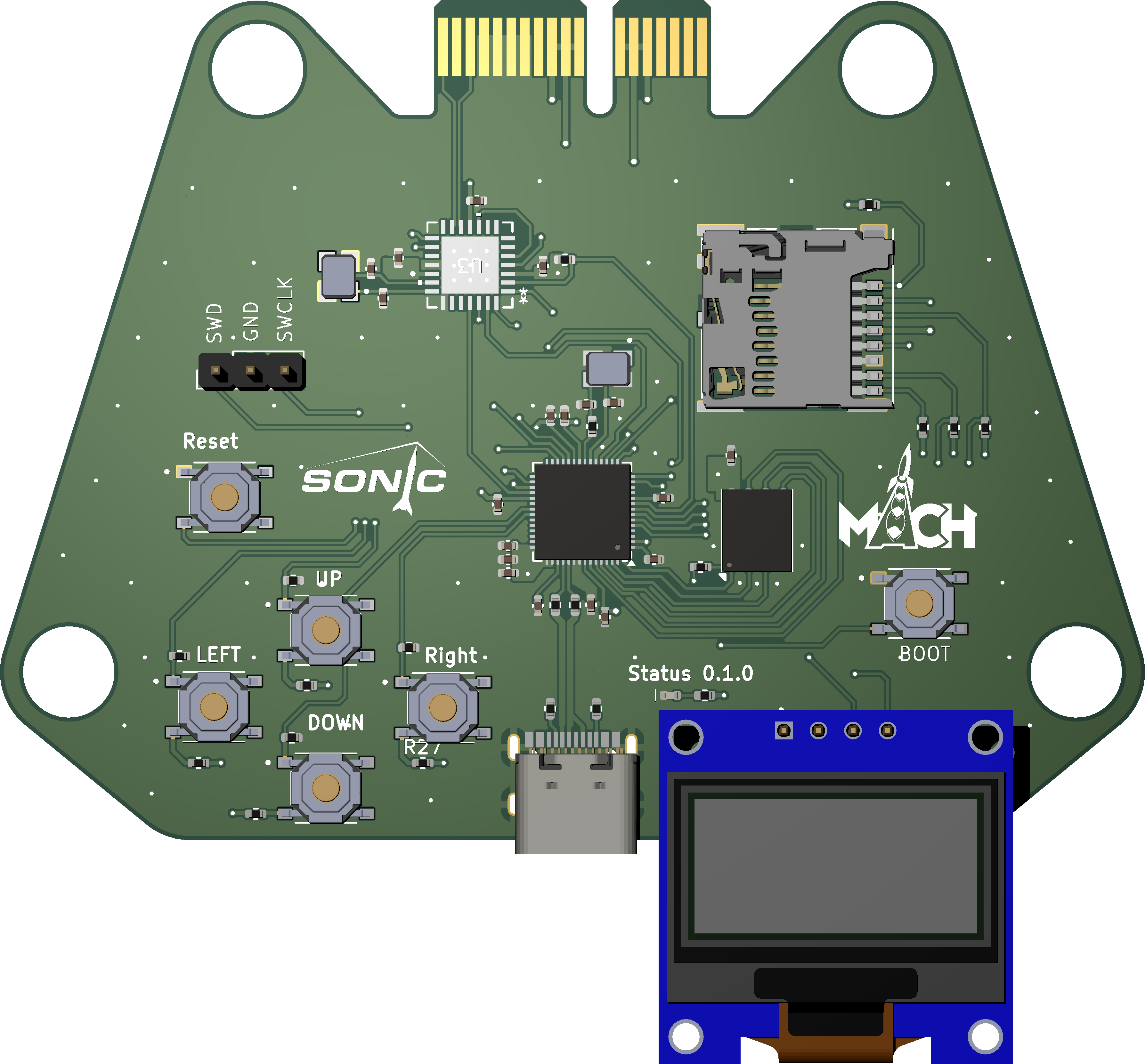
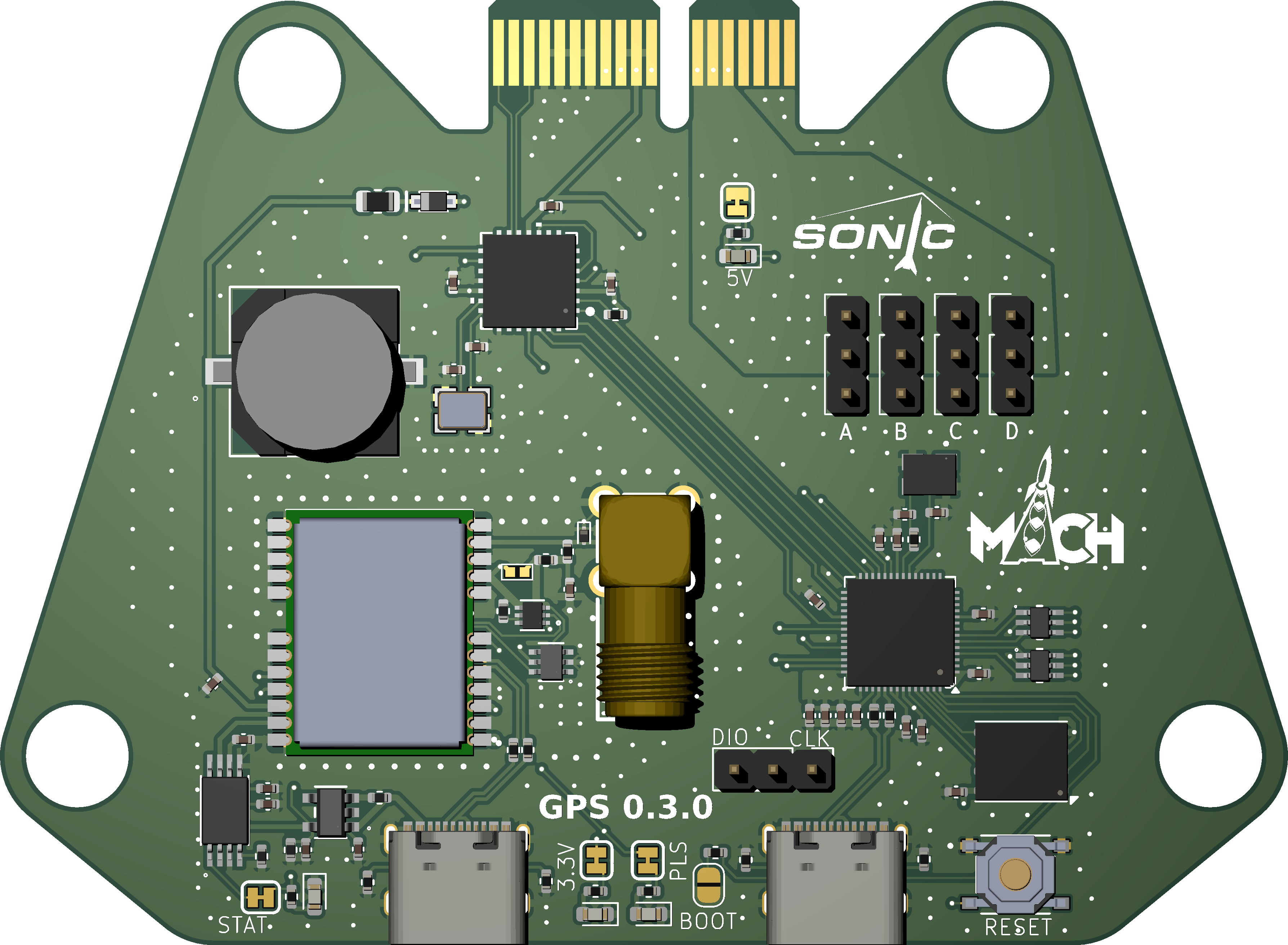
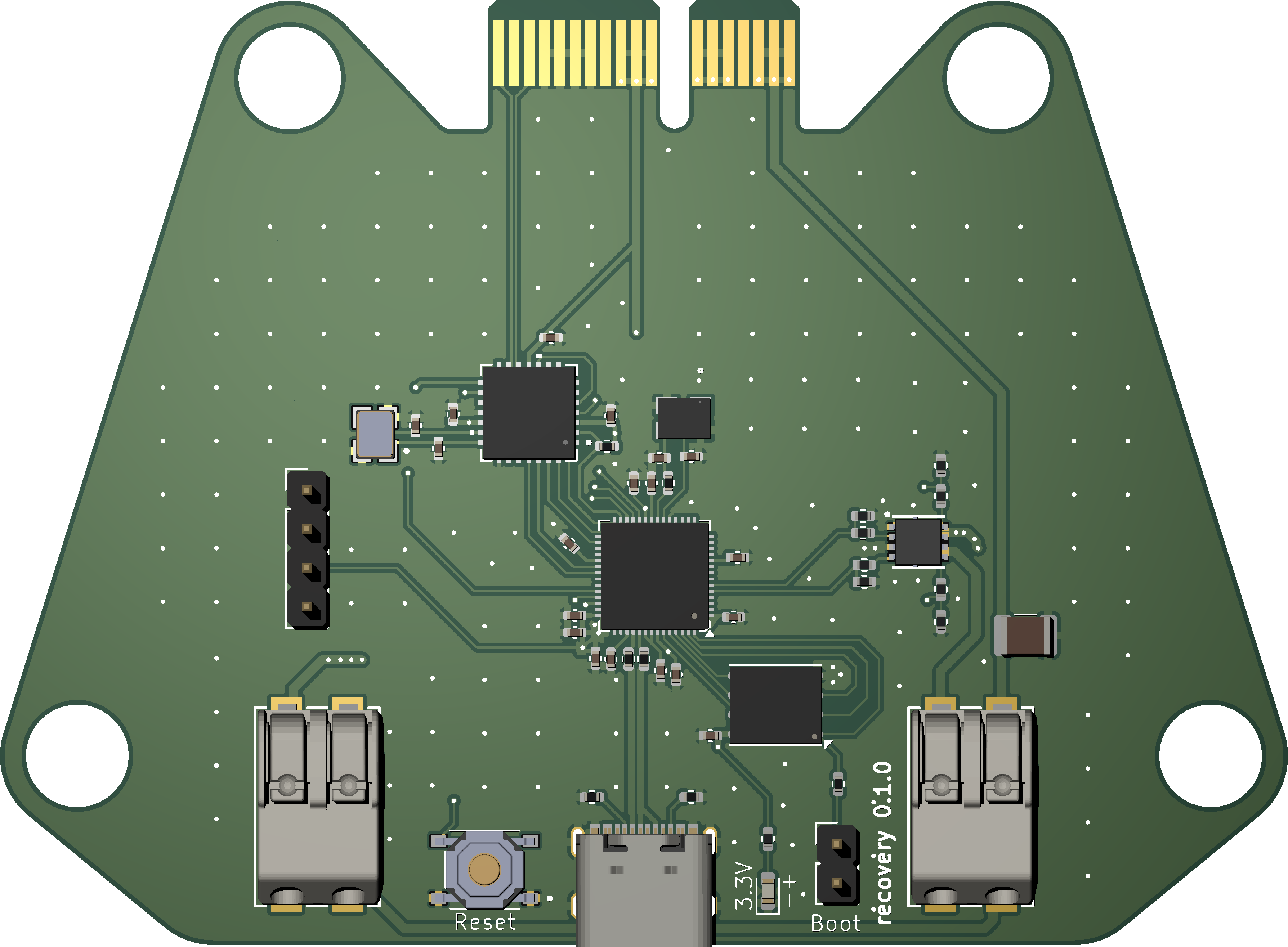
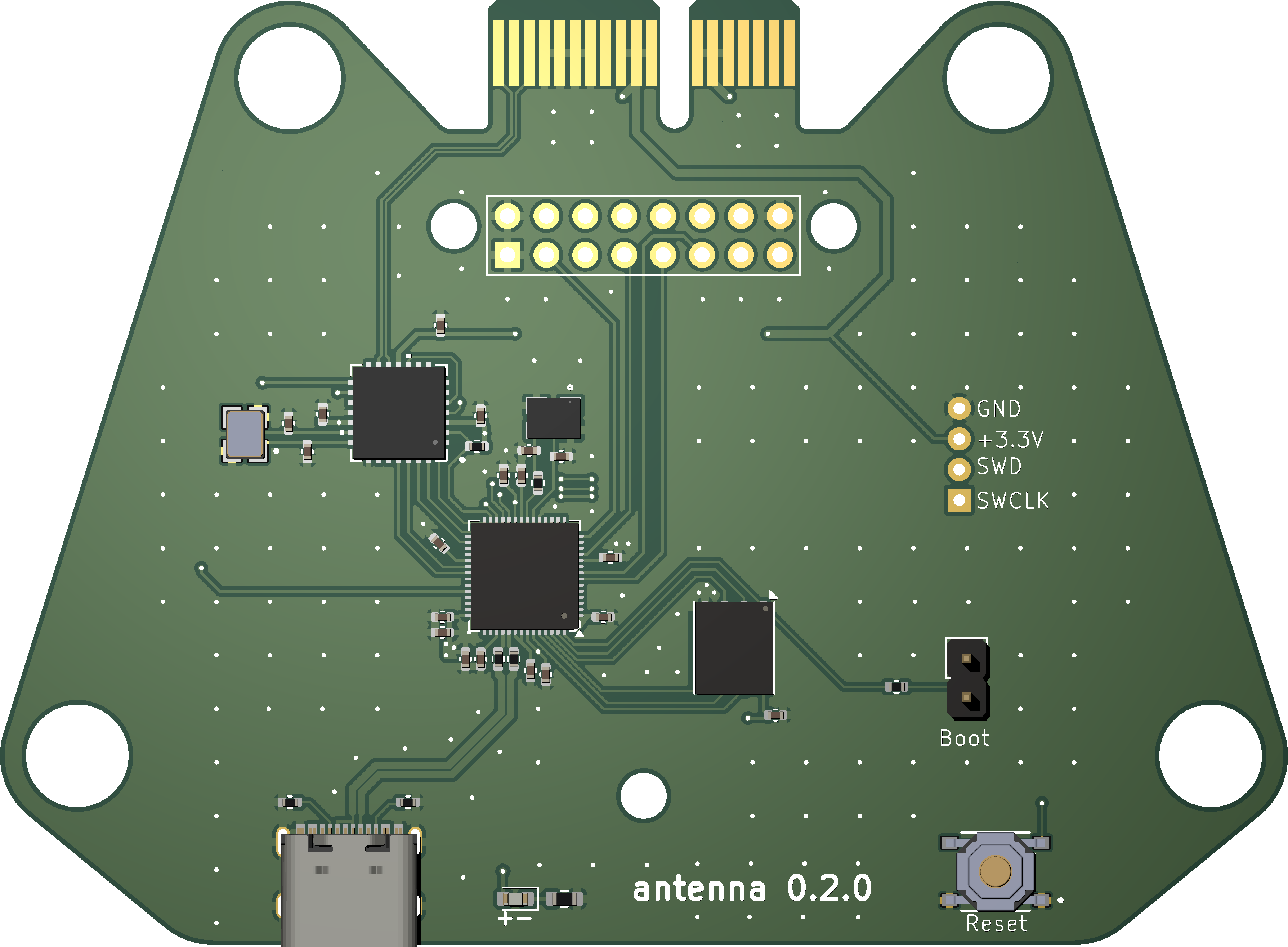
The avionics system is composed of five modules interconnected through CAN bus. These modules are: Power, Sensors, GPS, Antenna, and Recovery. The backplate features PCIe slots, and connects all the modules.
Requirements and Design Goals
The primary goal of the 4-inch avionics system is to enable learning. This will be the first system of many.
Primary Functional Requirements
- Don't be janky.
- Fully open-source.
- Assemblable by JLCPCB.
- Incorporate all known best practices to enable scalability.
- It will be a CAN-enabled system in a 4-inch diameter form factor.
Battery
The system will use a SRAD battery pack for custom-built boards, and COTS components will use a commercial battery pack. For the first launch, a 2s 2p pack inspired by this video will be used.
Improvements for the Next Version
- USB Multiplexer: Controlled by a Raspberry Pi Zero. The backplate will host the MUX, enabling digital reboots and removal of USB ports except on the Pi Zero.
- Programmable Power MUX: Allows remote rebooting of components.
- Ethernet: Inclusion for data transmission.
- Camera Transmission
- USB Protection IC
- Auto fuel fill